伺服电动缸 六自由度平台 厂家直销
服务热线:15255590325

六自由度并联机构核心技术起源及典型应用
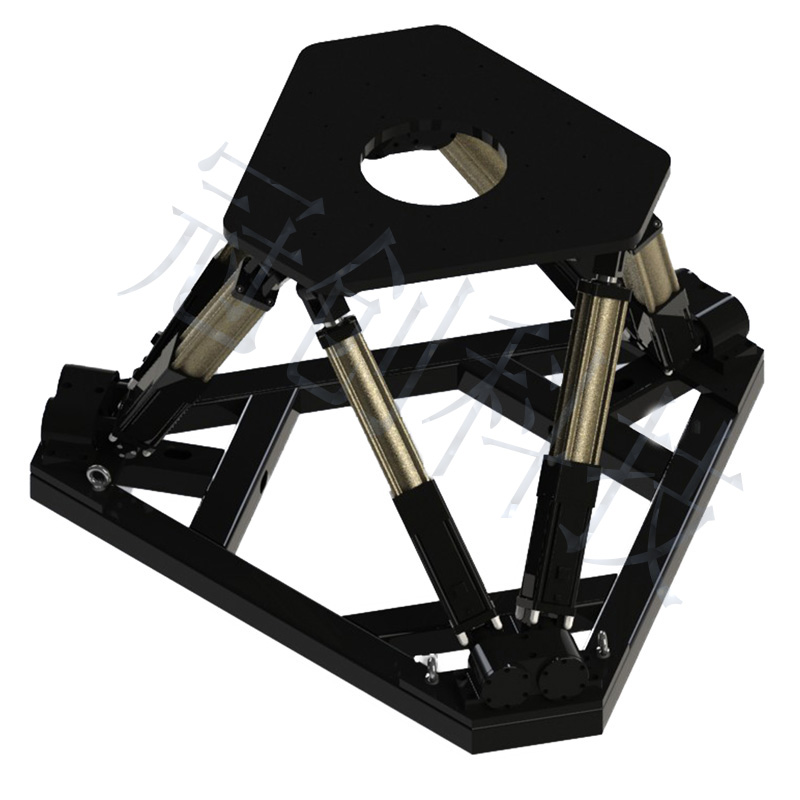
1950年,德国工程师Gough针对串联机械手刚度差、承载能力弱、有误差累集等缺点,提出一种6自由度的新型并联机构机器人,也就是我们所说的六自由度平台(Gough-Stewart平台)系统,其基本结构见图。

目前,六自由度平台系统一般用于两方面的用途:
并联机床:传统的数控机床各自由度是串接相连,悬臂结构,且传动链长,积累误差大而精度低,成本昂贵。相反,并联式加工中心结构相对简单,传动链极短,刚度大,质量轻,切削效率高而成本低。最关键的是,并联机床能够很容易实现“6轴联动”,因而能加工更复杂的三维曲面。下右图是哈工大研制的并联机床并联机床产品。

哈工大研制的并联机床

俄国的并联加工中心
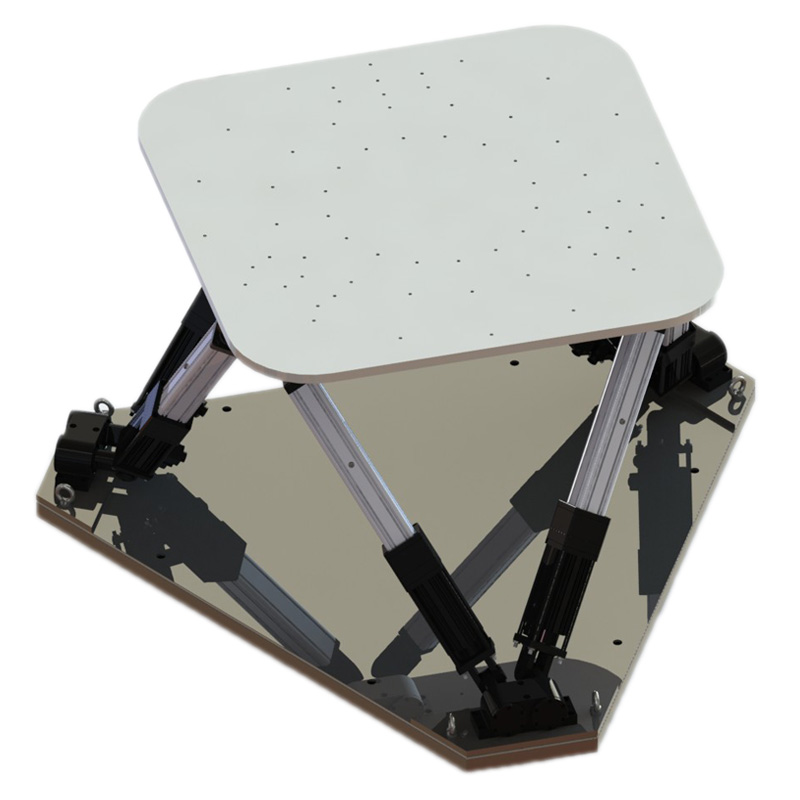
运行模拟器:由于六自由度平台以其承载能力大、加速性好等优点,非常适合于作为各种运动模拟器的运动单元。可以用六自由度平台进行飞行模拟,舰船运动模拟,道路路谱的复现,宇宙飞船空间对接的模拟等。
左图是国内厂家生产的一种模拟舰船的六自由度平台。
上一条: 电动缸是怎么控制力道大小的?
您可能对以下信息感兴趣?
-
2022-06-29
-
2022-06-24
-
2022-06-24
-
2022-06-24
-
2022-06-01
-
2022-05-25
-
2022-05-23
-
2022-05-23
-
2022-05-23
-
2022-05-19
您可能对以下产品感兴趣?


服务热线
15255590325