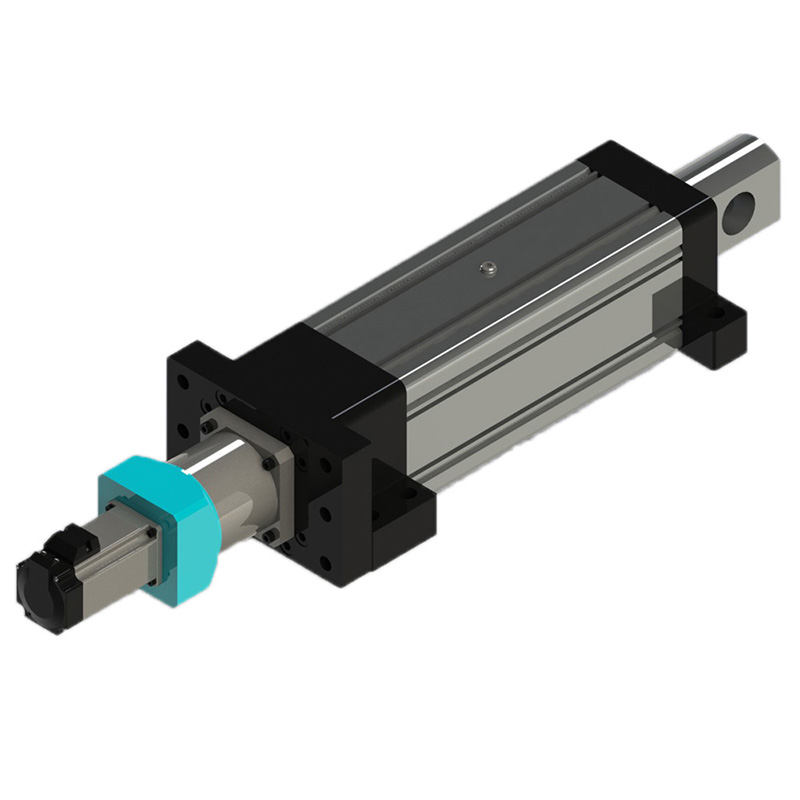
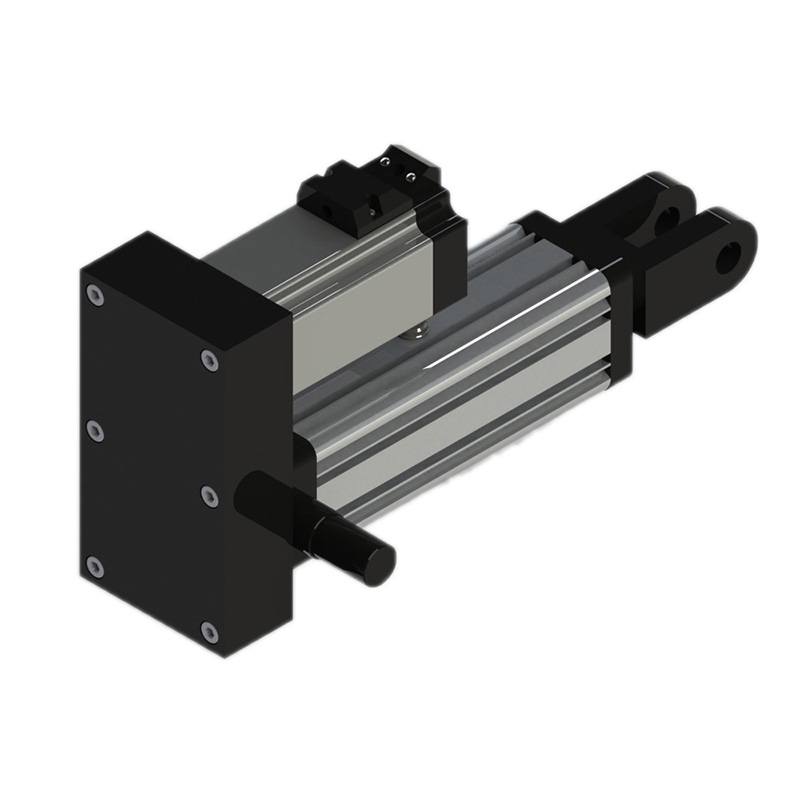
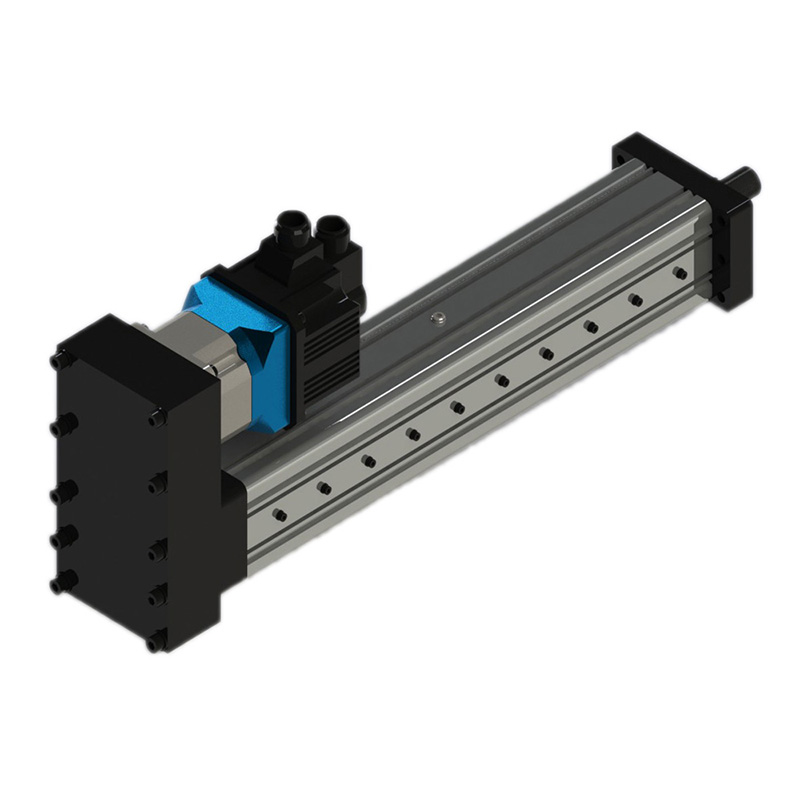
伺服电动缸 六自由度平台 厂家直销
服务热线:15255590325

FGC06-013 加速度1G 高速六自由度平台


六自由度运动仿真模拟平台系统由Stewart机构的六自由
度运动平台、计算机控制系统、驱动系统等组成。六自由度
运动平台的下平台安装在地面上,上平台为运动平台,它由
六只电动缸支承,运动平台与电动缸采用六个虎克铰连接,
电动缸与固定基座采用六个虎克铰连接,六只电动缸采用伺
服电机驱动的电动缸。计算机控制系统通过协调控制电动缸
的行程,实现运动平台的六个自由度的运动,即笛卡尔坐标
系内的三个平移运动和绕三个坐标轴的转动。




| 型号 | FGC06-013 |
| 负载 | 1.0KN |
| 速度 | 1000mm/s |
| 角度 | ±18度 |
| 备注 | 所有参数可根据客户要求定制 |

如需特殊规格 请与本厂商联系
上一条: 没有了!
您可能对以下信息感兴趣?
-
2022-06-29
-
2022-06-24
-
2022-06-24
-
2022-06-24
-
2022-06-01
-
2022-05-25
-
2022-05-23
-
2022-05-23
-
2022-05-23
-
2022-05-19
您可能对以下产品感兴趣?

服务热线
15255590325