1 前言
电动缸是将变频马达的旋转运动变成直线运动的设备 ,英文名称是 Electro2Servo2Cylinder。在电动缸纠偏系统中 ,由传感器采集信号送至放大器 ,控制变频器后由马达驱动电动缸 ,从而使纠偏辊动作 。相比液压缸纠偏系统 ,它省去了液压站和伺服阀 ,在结构上相对简洁 。据 EMG 公司介绍 ,国外一条 CGL 线 ,纠偏辊驱动全部使用电动缸 ,国内也越来越广泛的使用电动缸 。
2 电动缸的发展

2. 1 齿轮齿条式
最先出现的将电机的转动变成直线运动的形式是齿轮齿条 ,齿轮齿条结构简单 ,加工容易,安装方便 ,但是精度太低 。
2. 2 螺母丝杆
电机经过减速机驱动铜螺母 ,从而将电机的转动变成了直线运动 。但是 ,由于是螺纹附传动 ,实际运用中发现磨损太大 ,传动效率低 ,并且加工精度控制不好 ,往往单配一个铜螺母要花大量的时间 。平时要加强对螺纹附的润滑 ,一旦润滑跟不上 ,很快螺母就磨光了 。
2. 3 电液推杆
电液推杆是将液压站集成在推杆上 ,电机驱动油泵 ,油泵驱动液压缸 。这种形式并没有技术上的进步 ,只是形式上的改变 。只能运用在简单的开闭动作上 ,控制精度低 。
3 EM G的电动缸
3. 1 基本结构
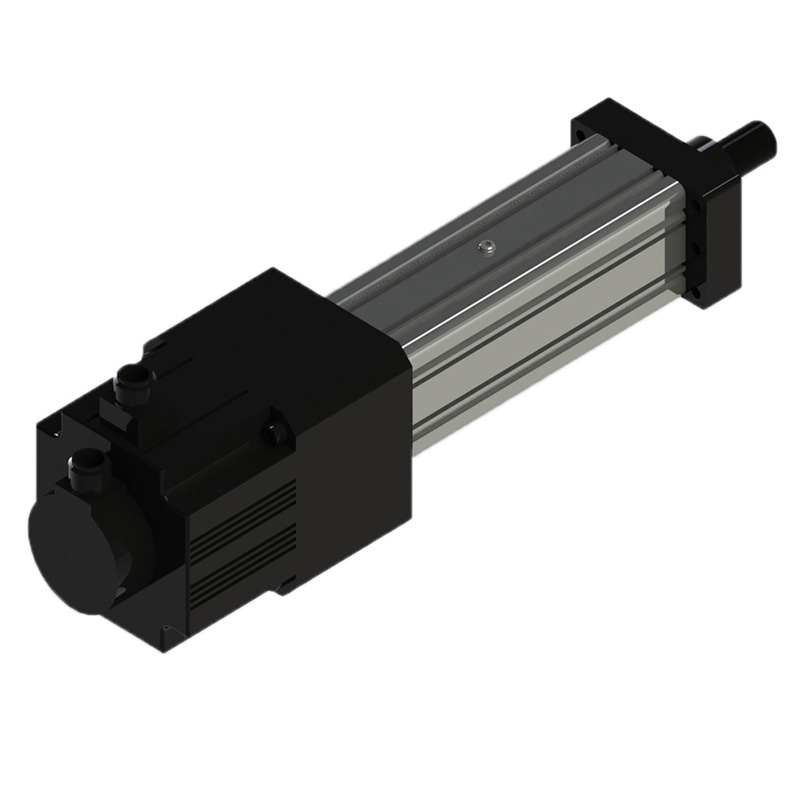
电动缸由变频电机 、芯轴 、行星轴 、推杆 、线性位移传感器等组成 。
电动缸的中心部分是芯轴 ,芯轴中心线和电机中心线重合 。芯轴和行星轴紧密啮合 (外螺纹和外螺纹的啮合 ) ,二者之间没有相对滑动 。电机通过联轴器驱动芯轴 ,芯轴只有自转 。芯轴的转动带动行星轴转动 ,其中包括了行星轴的自转和行星轴绕芯轴的公转 。行星轴公转的目的是保证芯轴和行星轴只存在相对滚动 。 8根行星轴之间用一个类似法兰盘的工件固定, 使得 8 根行星轴均布在芯轴的周围 。行星轴外圈有一个套,套和行星轴之间只有相对滚动而无相对轴向运动(套相当于行星轮系中的内齿轮 ) 。套和芯轴的双重作用为行星轴公转提供了有力保证 。套和电动缸的推杆刚性连接 ,当行星轴和芯轴发生相对轴向位移时 ,套和推杆获得了驱动力 ,推杆产生推力或拉力 。电动缸内置的线性位移传感器参与了推杆位置的控制 ,使电动缸输出更精确 。图 1是电动缸的外形图及芯轴和行星轴实物照片 。
3. 2 电动缸传动分析
电动缸的芯轴螺纹和行星轴螺纹公称直径不相等且都是右旋螺纹 ,啮合紧密 。这种设计打破了常规 ,采用外螺纹互相啮合 ,而不是内螺纹和外螺纹啮合 。 8根行星轴均布在芯轴周围 ,问题分析的前提是芯轴和行星轴之间只存在相对滚动 ,无相对滑动 。假如有相对滑动 ,电动缸就不能保证精确的传动比 ,也就没有讨论的意义 。事实证明 EMG 公司的独特设计和加工精度完全保证了这一点 。这种设计类似于行星齿轮箱 ,芯轴相当于太阳轮 ,行星轴相当于行星轮 。在行星齿轮箱中 ,太阳轮和行星轮啮合 ,在节圆处二者线速度相等 。在电动缸中 ,芯轴和行星轴靠外螺纹紧密啮合 ,二者在螺纹中径处线速度相等 。
为了便于叙述 ,假设芯轴和行星轴螺纹的作用集中在螺纹的中径上 。
3 . 3 电动缸受力分析
根据螺纹附受力分析模型 , 将对芯轴的受力分析简化为如图 2所示 , 假定芯轴和行星轴受力都集中在螺纹中径上 , 并且集中在一小段螺纹上 。受力分析简化为对圆柱体施加一个水平力 P, 使它沿着斜面匀速向上滚动 。
形辊转动长度 , 从而影响延伸率控制精度 。计算时入 、出口板形辊辊径是相同的 。但长期工作后 , 因入 、出口辊径磨损情况不同会造成辊径变化 , 这将影响到延伸率测量的精度和控制精度 。因脉冲发生器测量延伸率的精确度与测量周期 、响应速度有关 , 所以在系统响应速度允许的前提下 , 将采样率尽可能选择大一些 , 有利于提高系统精度 。
3 . 2 激光测速仪
激光测速仪的测量原理与脉冲发生器不同 ,
它是直接测量入 、出口带钢的长度 , 避免了因辊子打滑 、辊径变化等因素造成的测量精度的影响, 其测量精确程度比脉冲发生器更高 。所以大型冷轧厂普遍采用这种手段控制延伸率 。
4 结束语
平整工序除采用延伸率控制板形外 , 还有恒轧制力控制方式 。对延伸率控制 , 最重要的是确保延伸率测量的精确度和提高控制系统的响应速度 , 此外对来料的板形质量要求也较高 。多数冷轧厂平整线均采用激光测速仪进行延伸率测量控制 , 这样可以通过高精度的控制手段来获得高质量的产品 。
-
2022-06-29
-
2022-06-24
-
2022-06-24
-
2022-06-24
-
2022-06-01
-
2022-05-25
-
2022-05-23
-
2022-05-23
-
2022-05-23
-
2022-05-19