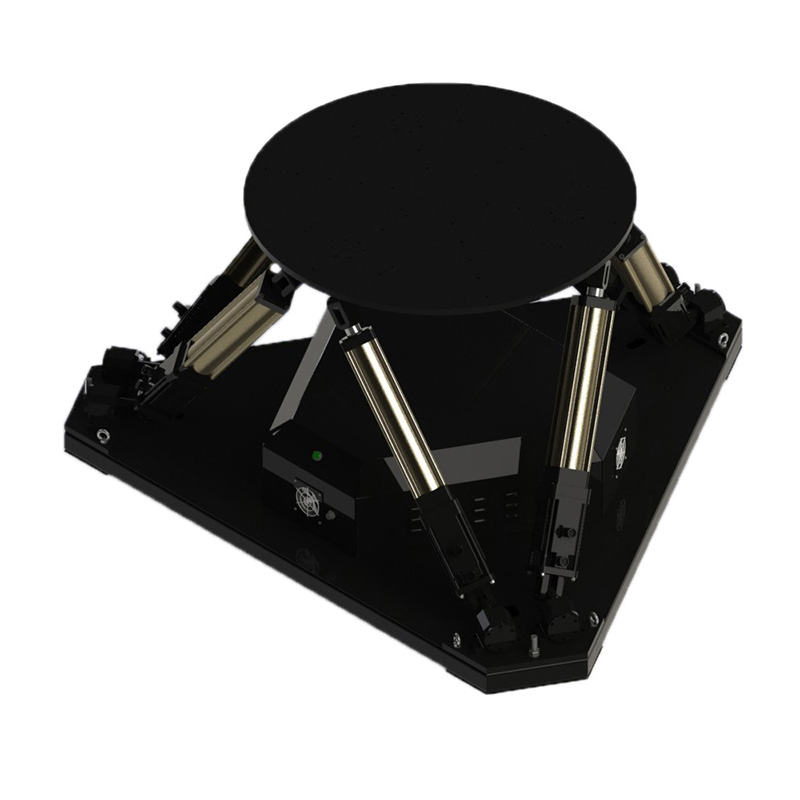

六自由度平台是现在很多高精度行业都会运用的一个装置,因为它可以模拟一些高难度的驾驶情境,例如飞机与舰船驾驶情况。那么它是由哪些系统组成的呢?主要是由位置控制、限位系统、伺服警报、人机界面以及急停装置这些系统组成的。那么在它运动的时候,也需要对它的运动进行控制。下面小编就针对六自由度平台的系统组成,以及它运动控制的控制策略来给大家具体介绍一下。
一、六自由度平台的系统组成
1、位置控制
控制方式主要是位置控制,当系统发出指令时,平台的六个电动缸能够按照指令,在系统限定范围内进行伸缩运动,使运动平台实现空间中六个自由度的目标运动。
2、限位系统
当六自由度平台的某个电动缸超过其运动范围时,必须有限位系统检测到这一问题,即刻将限位信号反馈至上位控制系统,系统发出警报,并执行相应保护措施。
3、伺服警报
当六自由度平台出现超载警报、电池警报、编码器通信警报、振动检测警报、散热系统过热警报等问题,系统会立即发出伺服警报,通过关闭伺服或指令脉冲禁止输入等动作,将伺服电机关闭,及时地保护运动平台。
4、人机界面
控制系统需提供一个用户使用的界面,操作简明,方便控制,该界面应包含:控制方案选择、参数初始化、基本指令输入输出等;平台的位置姿态和电动缸伸缩量、速度等反馈参量及其运动曲线的同步显示;伺服控制系统当前运行状态等。
5、急停装置
当系统发出严重故障问题警报时,若不能利用控制按键及时停止平台的运动,可以通过急停装置,直接切断整个系统电源,令平台立即停止运动,避免运动平台受到碰撞损坏等严重事故的发生。
六自由度平台
二、六自由度平台运动控制的控制策略
1、关节空间内的闭环控制
平台运动时,各电动缸伸缩长度伸缩速度不同,各电动缸输出力矩及所受负载等亦不相同,因此对各电动缸进行单独的闭环控制,也就是关节空间内的闭环控制。这种控制策略为准闭环控制,在使用时难以实现各电动缸的精确协同,因此对平台轨迹的控制精度有一定影响。
2、工作空间与关节空间内的闭环控制
这种控制策略是直接对平台的位置姿态进行闭环控制,形成工作空间内的闭环。然后根据计算得到的各电动缸的运动参数,在关节空间内针对各电动缸再进行闭环控制。
这种策略能够进一步提高平台末端的控制精度,而缺点在于计算量比较大,需要进行两次闭环计算及运动学反解计算,此外还需实时获得平台工作空间内的位置姿态值。
以上就是小编为大家介绍的关于六自由度平台的系统组成,以及它运动控制的控制策略,希望看完这篇文章之后,可以帮助大家更好地了解这个行业。
-
2022-06-29
-
2022-06-24
-
2022-06-24
-
2022-06-24
-
2022-06-01
-
2022-05-25
-
2022-05-23
-
2022-05-23
-
2022-05-23
-
2022-05-19