伺服电动缸 六自由度平台 厂家直销
服务热线:15255590325

六自由度振动台中算法是怎样的?
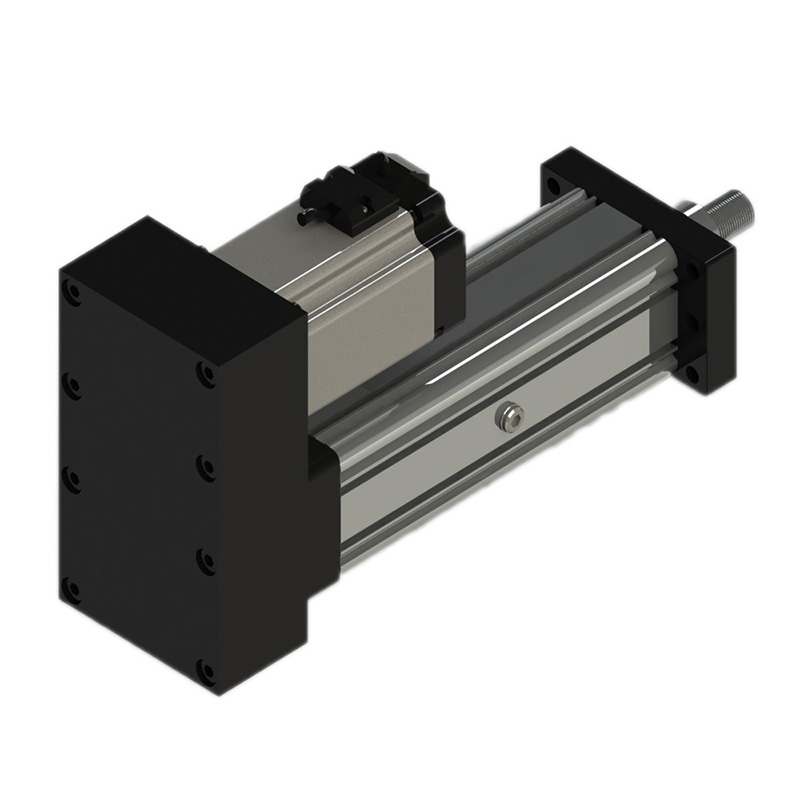
六自由度平台是由六根伺服电动缸、上下两个平台以及上下各六只虎克铰组成。下平台固定在基础设施上,通过六根伺服电动缸的伸缩运动,控制上平台在空间六个自由度(X、Y、Z、α、β、γ)运动,从而可以模拟出各种空间运动姿态。
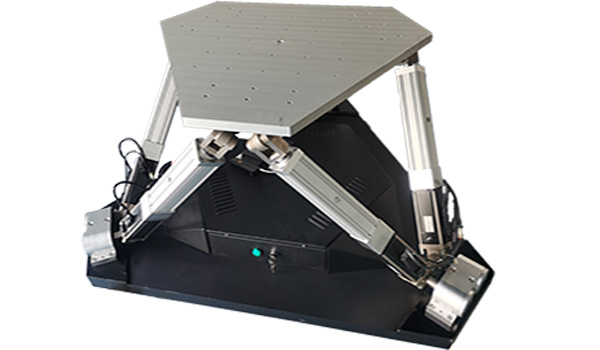
六个自由度分别是三维空间的XYZ轴以及分别绕YXZ轴旋转的ABC,面向坐标轴观察逆时针方向旋转为正。
绕X轴旋转这里称为A轴,一般习惯称为α或Roll轴(横滚、横摇)
绕Y轴旋转这里称为B轴,一般习惯称为β或Pitch轴(俯仰、纵滚或纵摇)运动
绕Z轴旋转这里称为C轴,一般习惯称为γ或Yaw轴(航向、偏航)
有效载荷:50Kg
自由度位移量速度加速度重复定位精度
升降±100mm±800mm/s±1m/s2 0.03mm
侧向±100mm±800mm/s±1m/s2 0.03mm
纵向±100mm±800mm/s±1m/s2 0.03mm
俯仰±15°±33.5°/s 359°/s2 0.03°
横滚±15°±33.5°/s 359°/s2 0.03°
偏航±15°±33.5°/s 359°/s2 0.03°
1、模拟飞行器用
广泛应用于各种训练模拟器如飞行操作模拟器、舰艇操作模拟器、直升机操作模拟器,坦克操作模拟器、汽车模拟器、等
2、精密定位测试用
广泛应用于各种汽车姿态测试设备、飞机飞行姿态测试设备、以及空间宇宙飞船的对接。同时利用多自由度精密定位机构,可做成高强度、高精度的多自由度机械和装配机械手,广泛应用于复杂的特种加工、复杂装配(如飞机装配)。
您可能对以下信息感兴趣?
-
2022-06-29
-
2022-06-24
-
2022-06-24
-
2022-06-24
-
2022-06-01
-
2022-05-25
-
2022-05-23
-
2022-05-23
-
2022-05-23
-
2022-05-19
您可能对以下产品感兴趣?



服务热线
15255590325