伺服电动缸 六自由度平台 厂家直销
服务热线:15255590325

如何正确选择一款合适的六自由度平台?
由于六自由度运动平台能够实现空间的六自由度运动,并且具有刚度大、承载能力强、结构比较简单、精度高、控制比较容易等优点,被成功用于飞行模拟器的运动系统、车载设备稳定系统的模拟试验,也可以用于各种舰载设备和机载设备稳定系统的模拟试验等;高精度的六自由度运动平台还可以用来进行惯性元器件的测试。
六自由度运动平台通过模拟飞机、舰船、车辆或者飞行器(以及其他类型的运载平台)运动过程中的姿态变化,为被试品提供一个接近实际工作状态的运动环境,在该运动环境下对被试品进行试验研究和性能考核。
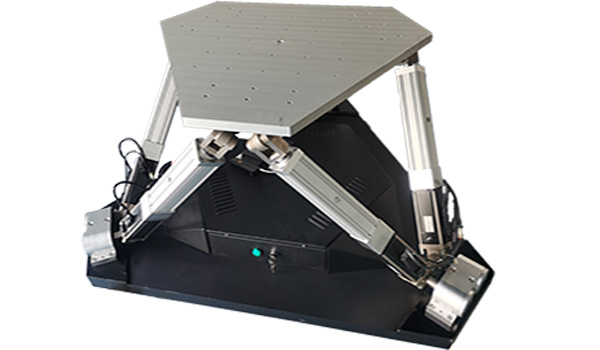
六自由度原理
六自由度运动平台是由六支作动筒,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支作动筒的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
六自由度平台是传动及控制技术领域的皇冠级产品,掌握了它,在传动和控制领域基本上就没有了难题。六轴并联的六自由度平台通过改变六个执行器伸缩行程来实现平台空间六自由度运动(垂向、横向、纵向、翻滚、俯仰、摇摆)以及绕这些自由度的复合运动。
六自由度分为模拟仿真六自由度和精密定位六自由度。
上一条: 六自由度振动台中算法是怎样的?
下一条:六自由度平台做什么用
您可能对以下信息感兴趣?
-
2022-06-29
-
2022-06-24
-
2022-06-24
-
2022-06-24
-
2022-06-01
-
2022-05-25
-
2022-05-23
-
2022-05-23
-
2022-05-23
-
2022-05-19
您可能对以下产品感兴趣?
服务热线
15255590325